¶ State Estimator Improvements
Technical Lead : Jack
Priority : Nice-to-have
Industry projects don’t hand tune control systems, they have a very accurate model of the hardware and update this based on test data. To start shifting in this direction we need to model the state estimator and the hardware sensors on MATLAB.
¶ Files
¶ Tasks
-
Model each sensor (DPS368XTSA1, H3LIS331DLTR, ICM-20608-G, MMC5983MA, MAX_M10S, RTK).
-
Implement code for spherical calibration of mag, high-g accel and low-g accel.
¶ Resources
¶ Notes
This is a block diagram of the systems.
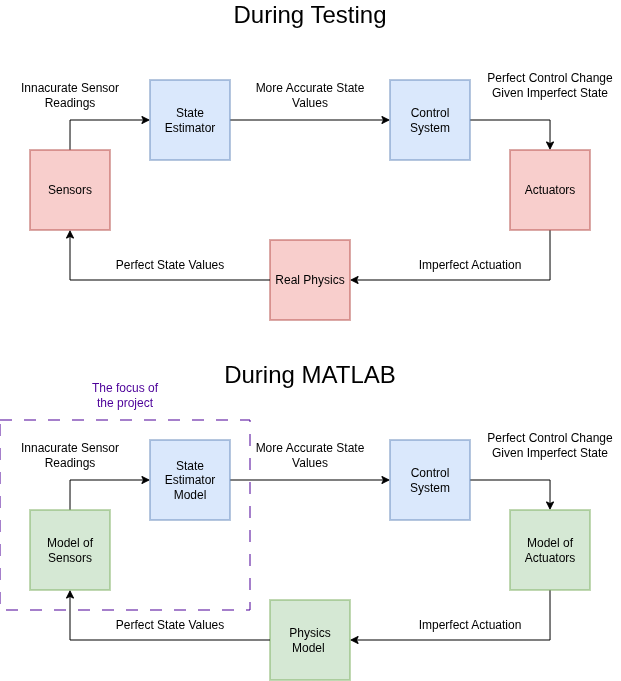
The current focus of the project is to improve the model of the sensors and from that produce a very high quality estimation of the states. The blue blocks are just code and therefore can be copied out of the MATLAB file and into the GNC system. The green blocks represent models and the red blocks represent physical dynamics that we must model.
An accelerometer measures specific force not acceleration of the body. This is a strange concept to understand but is very similar to how your body experiences force. When youre underwater you feel weightless, whereas you feel pulled downwards on land, even if you arent accelerating in both cases.
1g = 9.80665 m/s^2